
HARDWARES SiriNEO TECHNOLOGIES

| Equipamento | Classe | Figura |
|---|---|---|
| TBLACKSBOT | Hardware |  |
{kind=link}
Introdução
A TBLACKSBOT surge como uma plataforma revolucionária no cenário da robótica educacional e automação, combinando a acessibilidade do Arduino com soluções profissionais integradas. Diferente das abordagens tradicionais que exigem montagens complexas em protoboards, nosso sistema oferece uma solução completa e pronta para uso, acelerando significativamente o processo de aprendizado e desenvolvimento.
O projeto começou como uma Plataforma Robótica de estudos e aprendizado para competições como a OBR - Olimpíada Brasileira de Robótica, mas com o decorrer dos testes, observamos que era muito mais além, quando percebemos já estávamos fazendo testes com Inteligência Artificial e até jogando vídeo game com o robô.
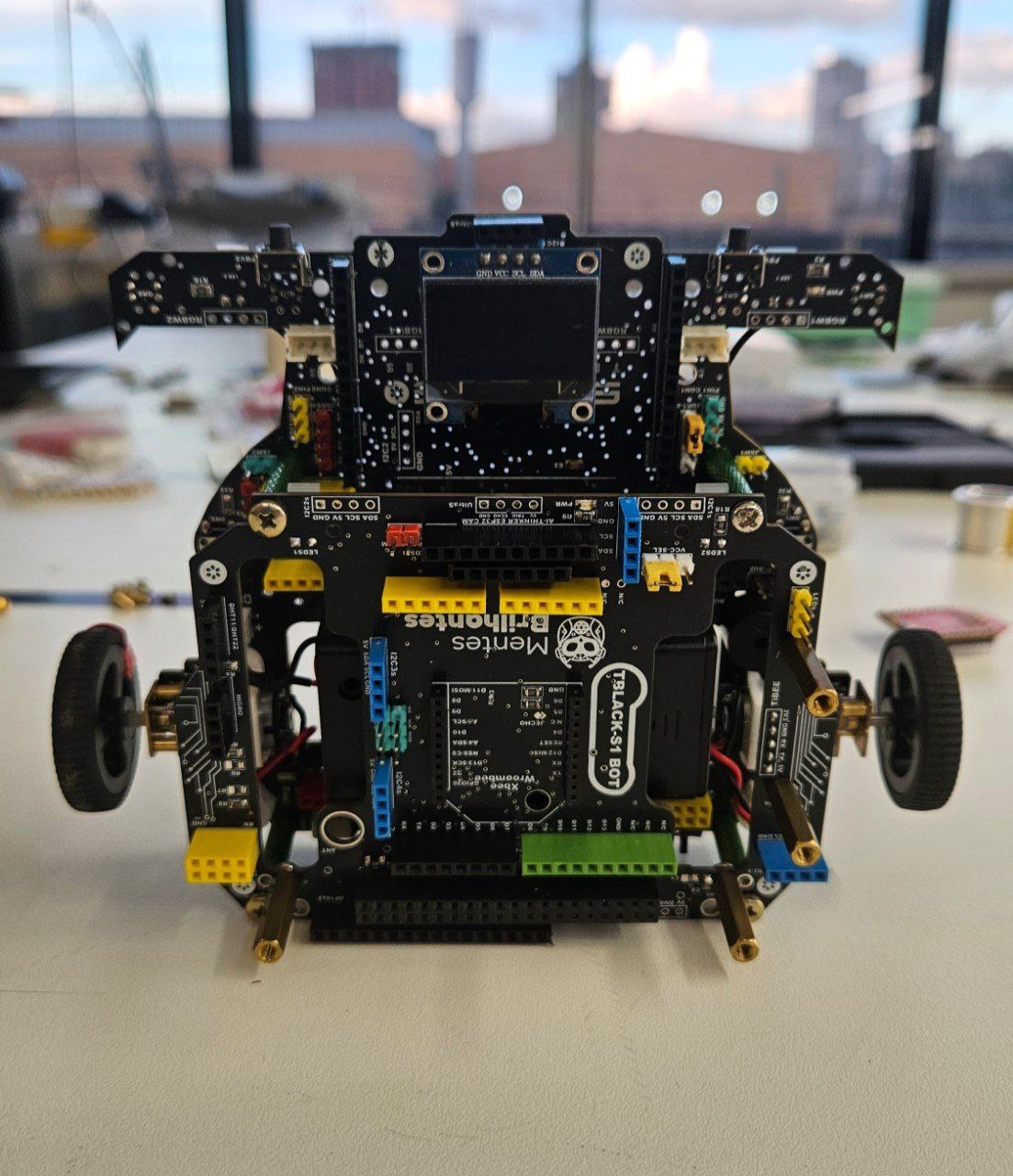
O que torna a TBLACKSBOT única é sua arquitetura modular que integra:
- Reduzir em até 70% o tempo de desenvolvimento de projetos
- Oferecer compatibilidade com múltiplas plataformas (Arduino, ESP32, Raspberry Pi, etc.)
- Uso para estudos de casos reais de aplicações
- Incluir bibliotecas otimizadas para pesquisas para aplicações industriais e educacionais
Como ferramenta educacional, a TBLACKSBOT abrange todo o espectro do aprendizado: dos fundamentos da eletrônica às implementações avançadas em Internet das Coisas (IoT), automação e Inteligência Artificial. No campo profissional, serve como um ambiente versátil e seguro para testes, simulações e validação de projetos em diversos tipos de contextos.
Mantida na vanguarda por atualizações constantes e baseada em uma comunidade global de desenvolvedores, a TBLACKSBOT não apenas acompanha a revolução tecnológica atual – ela está ajudando a construí-la, democratizando o acesso a ferramentas de de programação robustas, estamos plantando as sementes para o futuro, equipando os engenheiros, estrudantes e makers do amanhã com o conhecimento de hoje.
Dados do Hardware

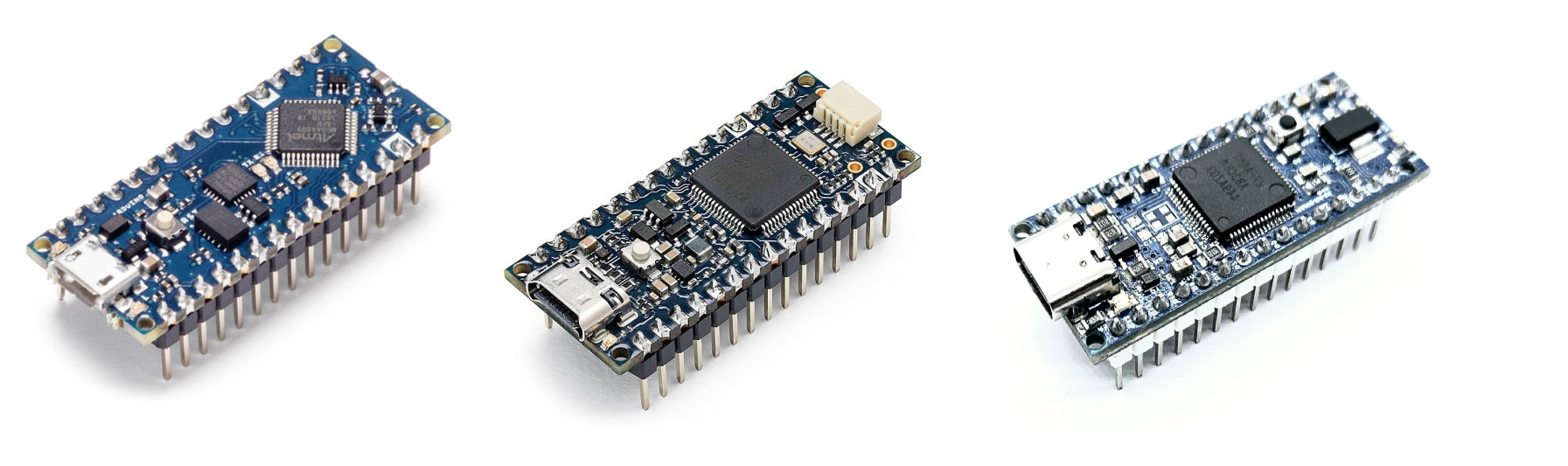
A TBLACKSBOT é uma plataforma de hardware para introdução estudos de programação, robótica, IoT e Inteligência Artificial, compatível com Arduino Nano, Esp32 Nano, Raspberry Pi Zero e Raspberry Pico, dentre outros.
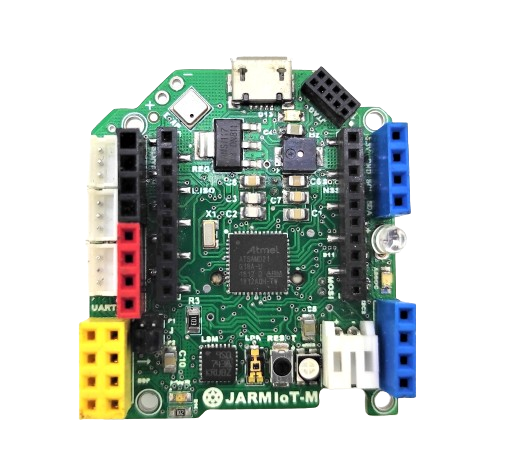
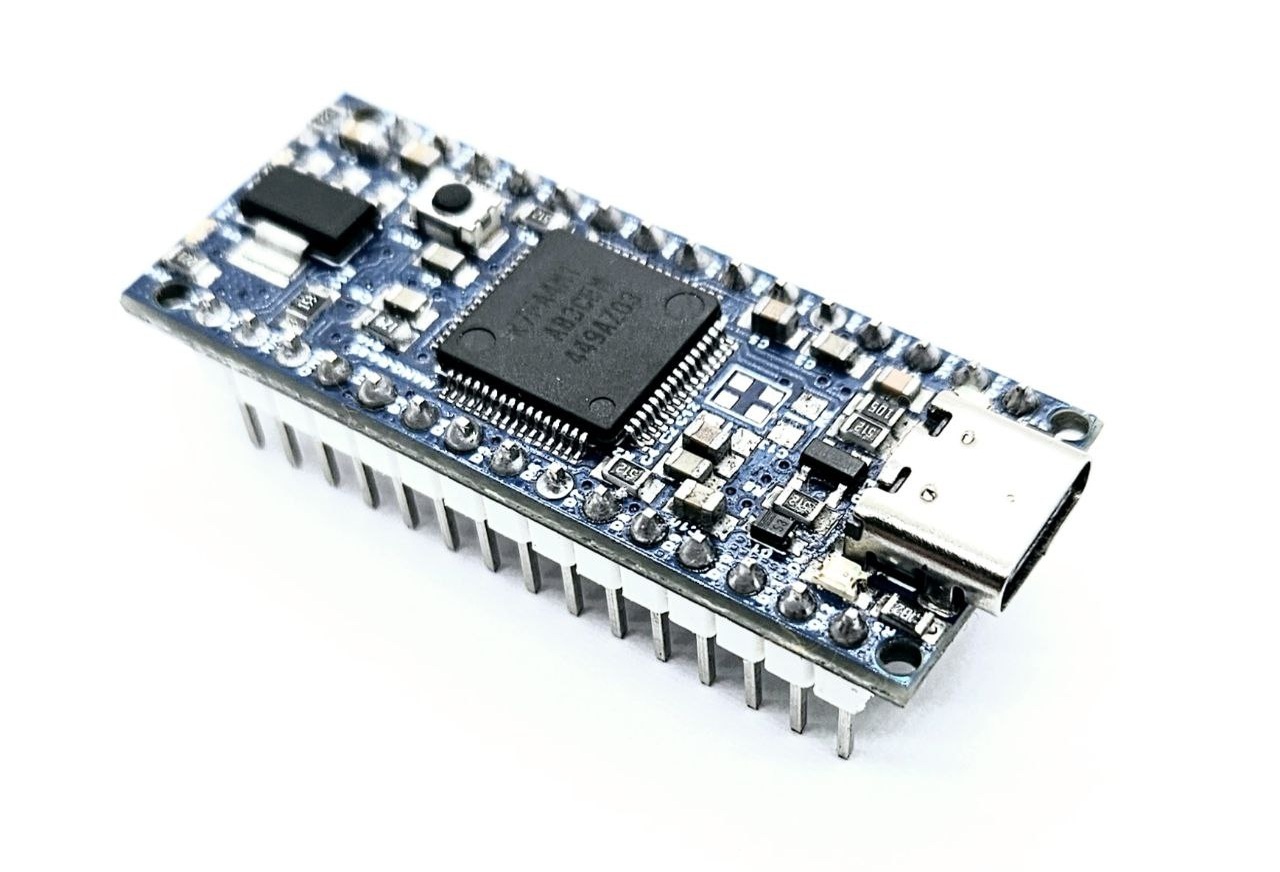
Para nossa Plataforma TBLACKSBOT a SiriNEO Technologies desenvolveu o Arduino NANO R4 ST (Renesas RA4M1 - ARM Cortex-M4), atendendo demandas de desempenho, precisão e confiabilidade.
O RA4M1 opera a até 48 MHz, 256 KB Flash, 32 KB SRAM, ADC 14 bits, temporizadores, I²C/SPI/UART, USB FS e FPU integrada.
A plataforma também pode utilizar o ESP32-S3 Nano (dual-core Xtensa LX7 até 240 MHz, Wi-Fi, BLE 5.0 e instruções vetoriais para IA/ML).
Considerações
A TBLACKSBOT oferece compatibilidade com o legado de hardware e shields existentes, é uma solução de alto custo-benefício para escolas públicas, institutos e universidades, proporcionando acesso a tecnologias modernas.
Como base de testes para Robótica, IoT e IA, oferece solução de baixo custo do nível básico ao avançado, economizando tempo e recursos.
Dimensões
A ser escrito...
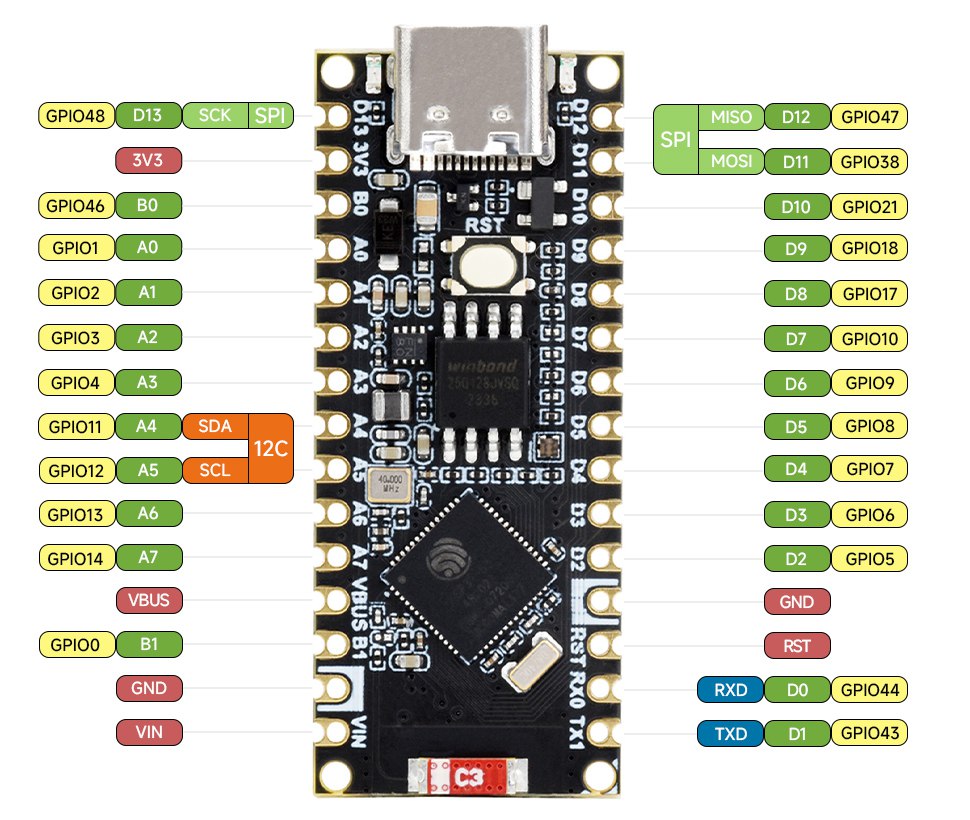
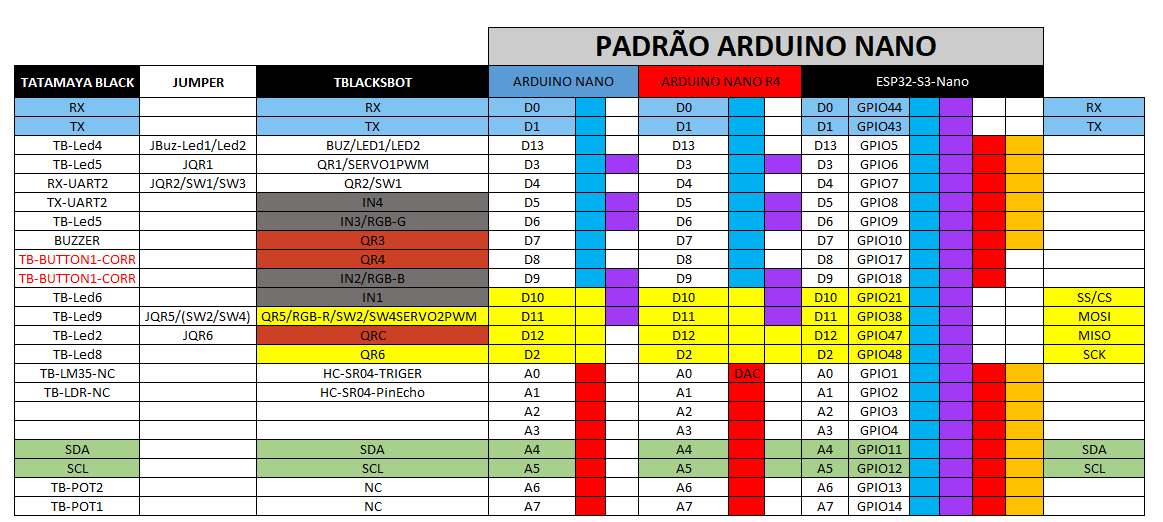
Pinout
Abaixo a configuração da pinagem no padrão do Arduino Nano, Arduino Nano R4 e Arduino ESP32 Nano S3.
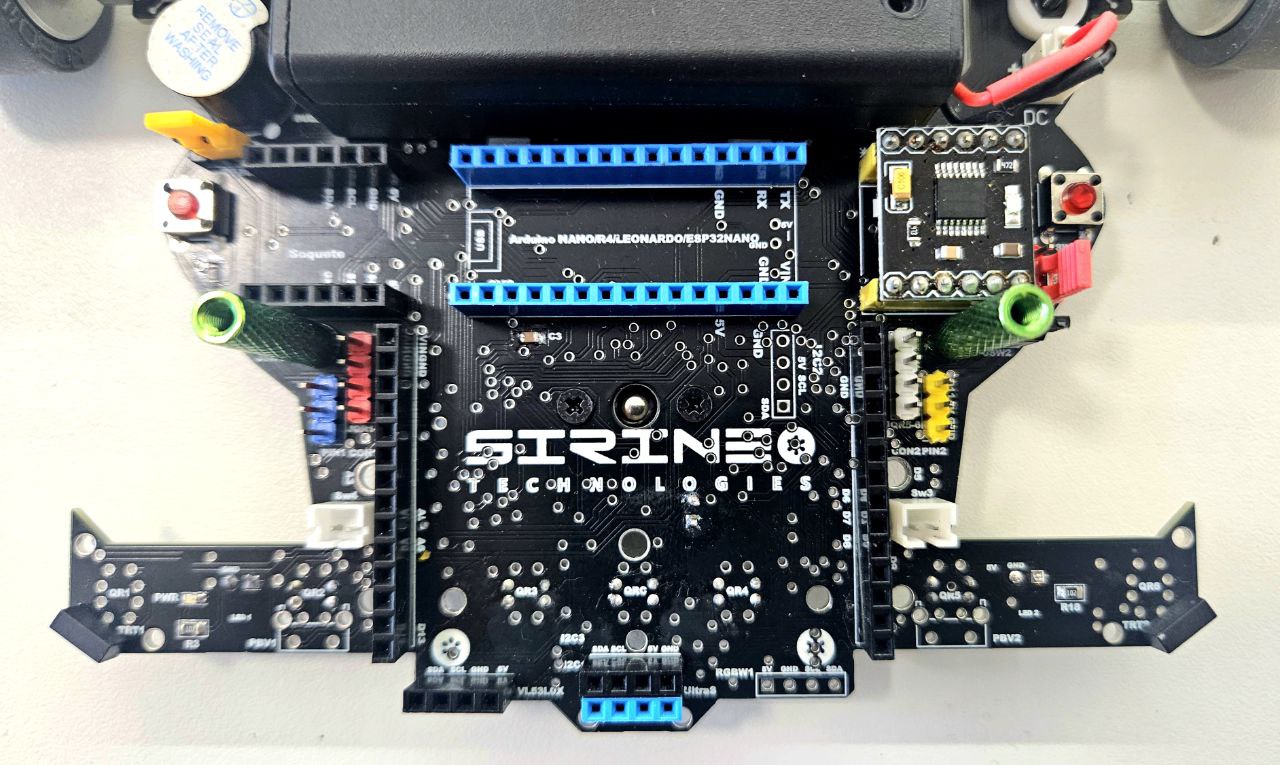
Abaixo a configuração do Soquete Arduino Nano, Arduino Nano R4 e Arduino ESP32 Nano S3.
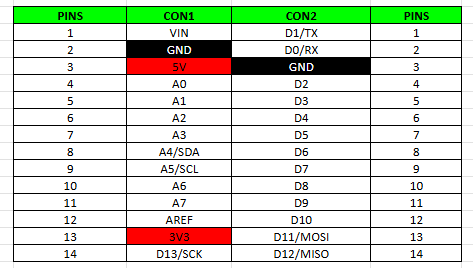
Abaixo a numeração da configuração dos pinos
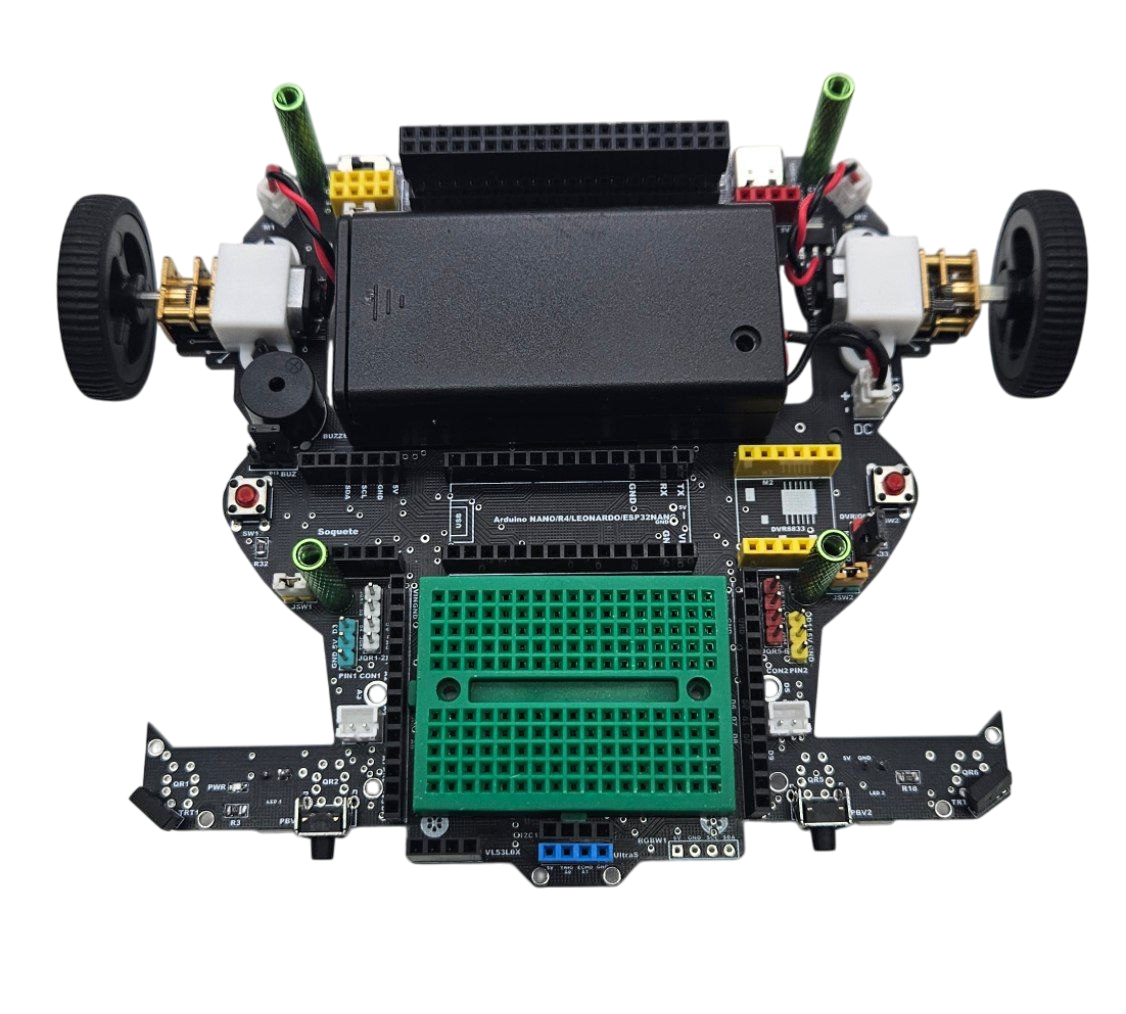
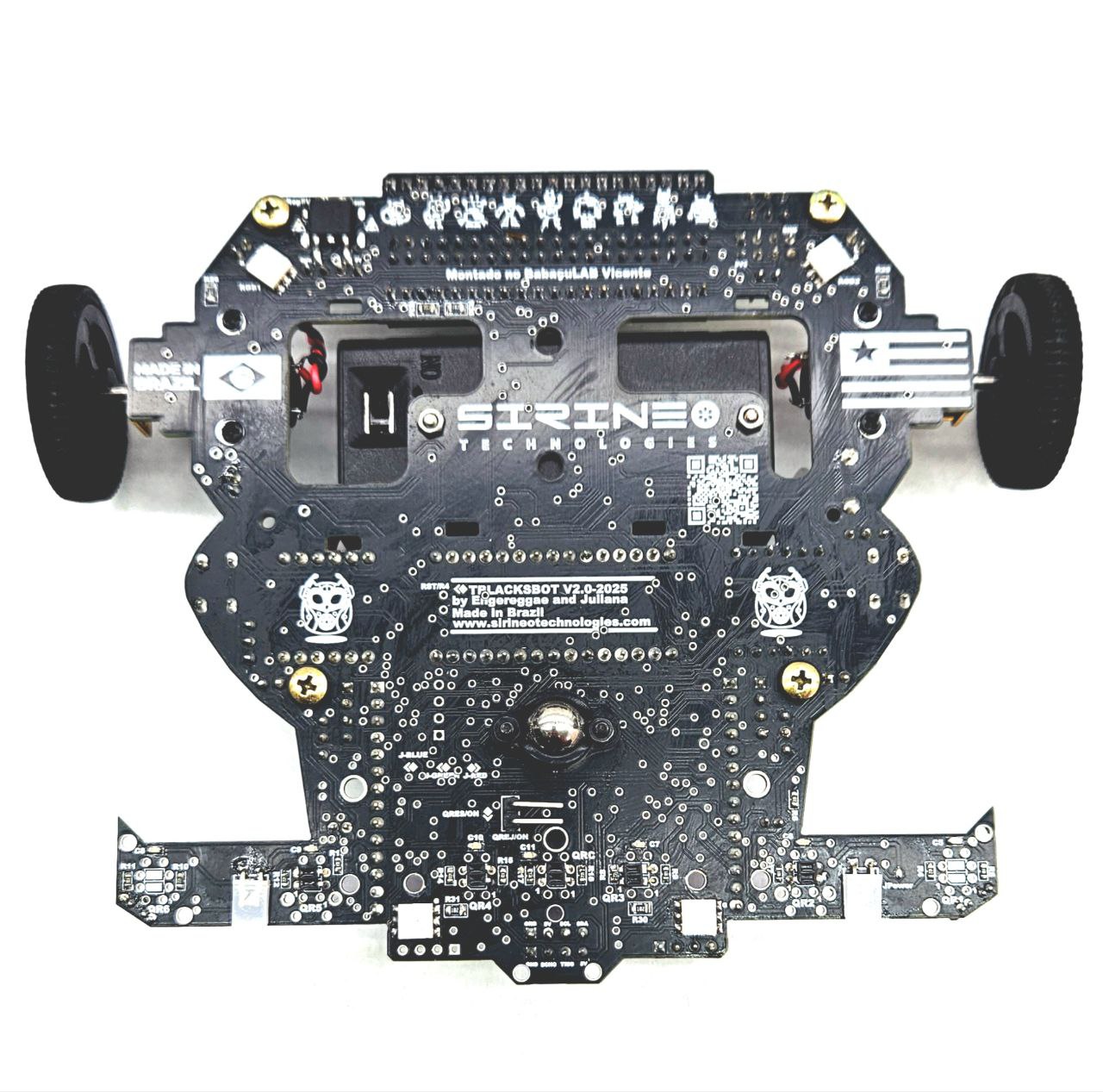
Abaixo a vista inferior da TBLACKSBOT.
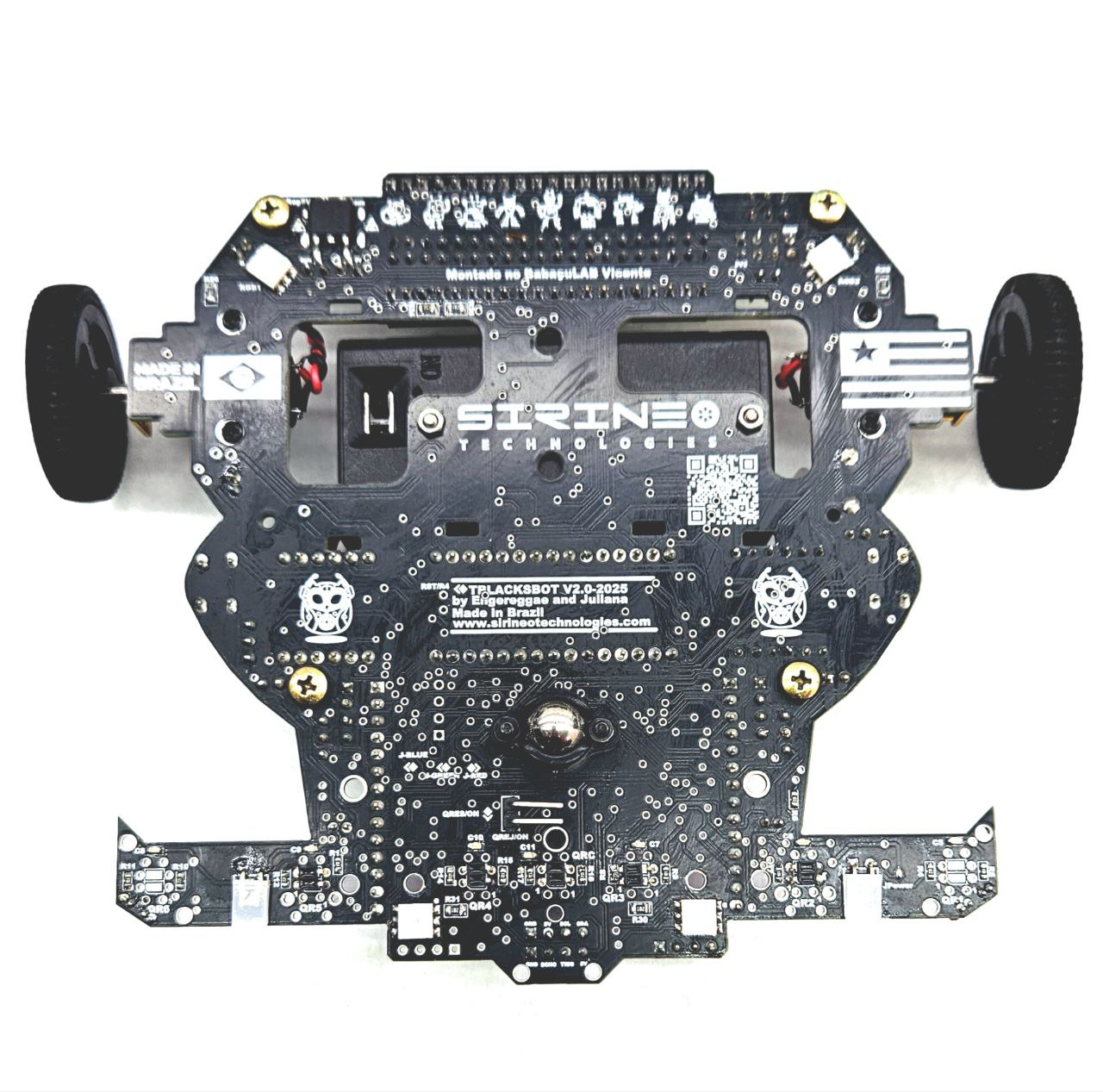
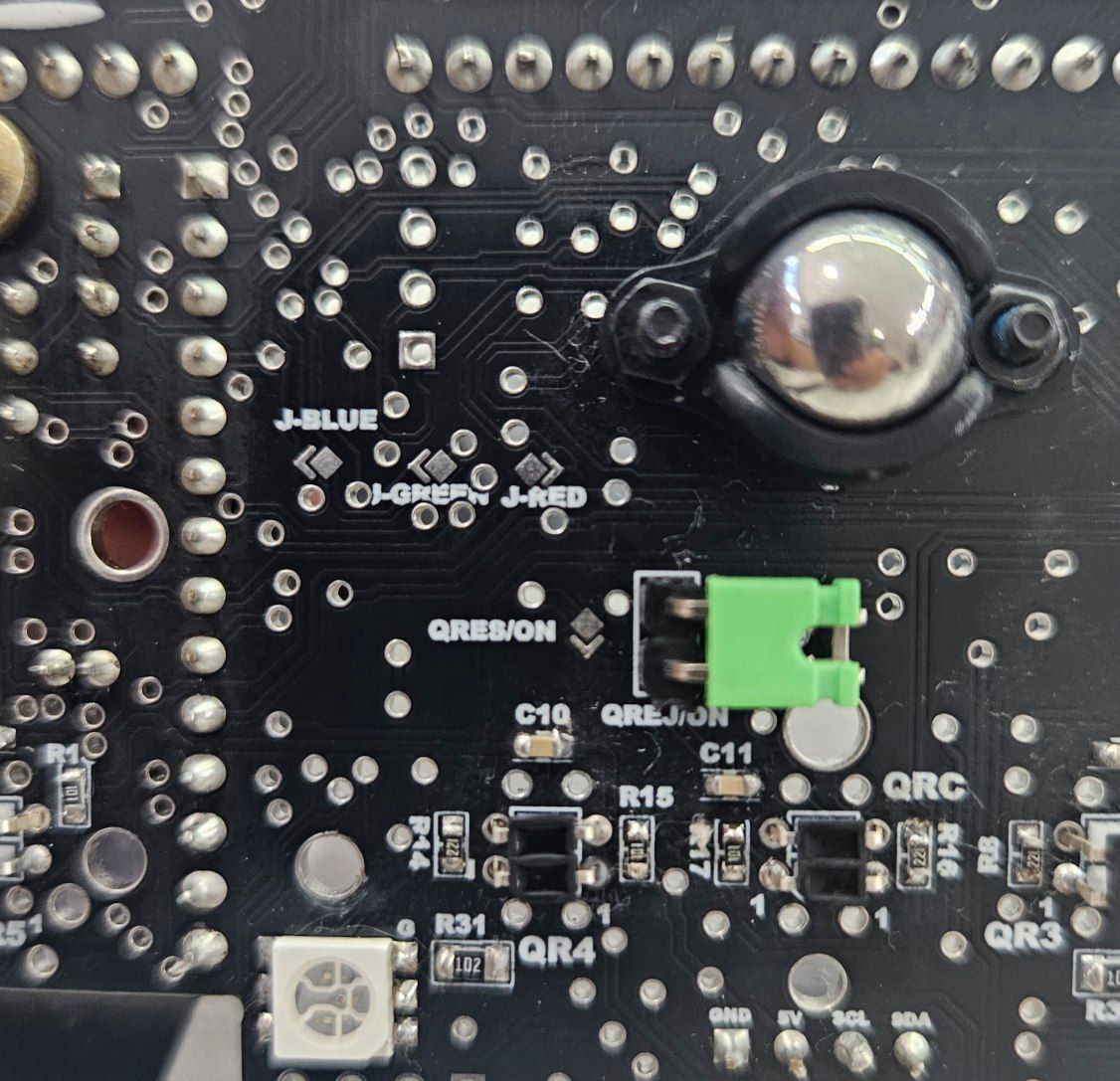
Abaixo a vista inferior da TBLACKSBOT, com o detalhes dos jumpers
Composição do Hardware
A ser escrito...
Programação básica com Arduino Nano/NANOST
Nesse parte iremos iniciar alguma programações básicas com a TBLACKSBOT e o protoboard integrado a ela
-
face_shakePiscando um led com a TBLACKSBOT

Pisca Led.ino// TBLACKSBOT - Tutorial Pisca LED
// Sirineo Technologies
// Este código faz um LED piscar no pino 13
void setup() {
// Configura o pino 13 como saída
pinMode(13, OUTPUT);
}
void loop() {
// Acende o LED
digitalWrite(13, HIGH);
// Espera 1 segundo
delay(1000);
// Apaga o LED
digitalWrite(13, LOW);
// Espera 1 segundo
delay(1000);
}face_shake Push button - TBLACKSBOT
PushButton_TblackSBOT.ino/*
* Nome Programa: TBLACKSBOT - LIGAR e DESLIGAR LED
* Mentes Brilhantes TEC - Sirineo Technologies
* Explicação: Este código faz um LED ligar com um botão e desligar com outro botão (sistema de retenção)
* Autor: Equipe TBLACKSBOT
* Acesse: https://sirineotechnologies.com/sirineo-wiki/GITbook-SiriNEOTchnologies-2024/Tblacksbot/tblacksbot.html
*
* Material necessário:
* - Plataforma TBLACKSBOT - SiriNEO Technologies (com Arduino Nano R4 integrado)
* - LED já instalado na plataforma
* - 2x botões pushbutton (SW1 e SW2) já instalados na plataforma
*/
// =============================================================================
// DEFINIÇÃO DOS PINOS DA PLATAFORMA TBLACKSBOT
// =============================================================================
#define SW1_PIN 4 // Botão SW1 para LIGAR o LED (conectado ao pino digital D4)
#define SW2_PIN 11 // Botão SW2 para DESLIGAR o LED (conectado ao pino digital D11)
#define LED_PIN 13 // LED (conectado ao pino digital D13)
// =============================================================================
// VARIÁVEIS GLOBAIS
// =============================================================================
bool estadoLED = false; // Variável para armazenar o estado atual do LED (false = desligado, true = ligado)
// =============================================================================
// CONFIGURAÇÃO INICIAL (executa uma vez ao ligar a TBLACKSBOT)
// =============================================================================
void setup() {
// Configura o pino do LED como SAÍDA
// NA TBLACKSBOT: O LED já está conectado com resistor apropriado
pinMode(LED_PIN, OUTPUT);
// Configura os pinos dos botões como ENTRADA com resistor de pull-up interno
// NA TBLACKSBOT: Os botões já estão conectados corretamente na placa
pinMode(SW1_PIN, INPUT_PULLUP);
pinMode(SW2_PIN, INPUT_PULLUP);
// Inicializa o LED como desligado
digitalWrite(LED_PIN, LOW);
estadoLED = false;
// Inicia a comunicação serial para monitoramento
Serial.begin(9600);
Serial.println("==================================================");
Serial.println("PLATAFORMA TBLACKSBOT - SiriNEO Technologies");
Serial.println("Sistema de Controle LED com Retencao");
Serial.println("==================================================");
Serial.println("Pressione SW1 (D4) para LIGAR o LED");
Serial.println("Pressione SW2 (D11) para DESLIGAR o LED");
Serial.println("==================================================");
}
// =============================================================================
// LOOP PRINCIPAL (executa repetidamente)
// =============================================================================
void loop() {
// Lê o estado dos botões da TBLACKSBOT
// NA TBLACKSBOT: Quando o botão é pressionado, o pino vai para LOW (0V)
bool sw1Pressionado = (digitalRead(SW1_PIN) == LOW);
bool sw2Pressionado = (digitalRead(SW2_PIN) == LOW);
// Verifica se o botão SW1 (LIGAR) foi pressionado
if (sw1Pressionado) {
// Liga o LED
digitalWrite(LED_PIN, HIGH);
estadoLED = true;
// Feedback no monitor serial
Serial.println("LED LIGADO pelo SW1 (D4)");
// Pequeno delay para evitar leitura múltipla do mesmo pressionamento
delay(250);
}
// Verifica se o botão SW2 (DESLIGAR) foi pressionado
if (sw2Pressionado) {
// Desliga o LED
digitalWrite(LED_PIN, LOW);
estadoLED = false;
// Feedback no monitor serial
Serial.println("LED DESLIGADO pelo SW2 (D11)");
// Pequeno delay para evitar leitura múltipla do mesmo pressionamento
delay(250);
}
// Pequena pausa para estabilidade do sistema
delay(10);
}
// =============================================================================
// EXPLICAÇÃO DO FUNCIONAMENTO NA PLATAFORMA TBLACKSBOT
// =============================================================================
/*
* CARACTERÍSTICAS DA PLATAFORMA TBLACKSBOT:
*
* 1. Tudo já está conectado e preparado para uso:
* - LED com resistor já conectado ao pino D13
* - Botões SW1 e SW2 com resistores já conectados aos pinos D4 e D11
*
* 2. Não é necessário fazer nenhuma ligação externa
*
* 3. Os botões funcionam com lógica ativa em LOW:
* - Quando NÃO pressionado: o pino lê HIGH (5V)
* - Quando pressionado: o pino lê LOW (0V)
*
* 4. O sistema tem "retenção", meaning que o LED mantém seu estado até que
* outro botão seja pressionado
*
* VANTAGENS DA PLATAFORMA TBLACKSBOT:
*
* - Plug and play: tudo já está conectado e pronto para uso
* - Não requer conhecimentos avançados de eletrônica
* - Ideal para aprendizado e prototipagem rápida
* - Compatível com diversos sensores e módulos
*
* PARA OS ALUNOS:
*
* Experimentem modificar o código para:
* 1. Inverter a função dos botões
* 2. Fazer o LED piscar quando pressionar SW1
* 3. Adicionar um terceiro botão para funções extras
* 4. Controlar a intensidade do LED com PWM
*/
// =============================================================================
// FIM DO PROGRAMA
// =============================================================================face_shakePotenciometro Controlando LED - TBLACKSBOT
Potenciometro_TBLACKSBOT.ino/*
* Nome Programa: TBLACKSBOT - Pisca LED com Potenciômetro
* Mentes Brilhantes TEC - Sirineo Technologies
* Explicação: Este código faz um LED piscar com velocidade controlada por potenciômetro
* Autor: Equipe TBLACKSBOT
* Acesse: https://sirineotechnologies.com/sirineo-wiki/GITbook-SiriNEOTchnologies-2024/Tblacksbot/tblacksbot.html
*
* Material necessário:
* - Plataforma TBLACKSBOT - SiriNEO Technologies (com Arduino Nano R4 integrado)
* - LED já instalado na plataforma (D13)
* - Potenciômetro de 5K conectado no pino A2 da TBLACKSBOT
* - Mini protoboard integrado a TBLACKSBOT
*/
// =============================================================================
// DEFINIÇÃO DOS PINOS DA PLATAFORMA TBLACKSBOT
// =============================================================================
#define POTENCIOMETRO_PIN A2 // Potenciômetro conectado no pino analógico A2
#define LED_PIN 13 // LED conectado no pino digital D13
// =============================================================================
// VARIÁVEIS GLOBAIS
// =============================================================================
int tempoPisca = 500; // Tempo inicial de piscada (em milissegundos)
int valorPotenciometro = 0; // Valor lido do potenciômetro
// =============================================================================
// CONFIGURAÇÃO INICIAL (executa uma vez ao ligar a TBLACKSBOT)
// =============================================================================
void setup() {
// Configura o pino do LED como SAÍDA
// NA TBLACKSBOT: O LED já está conectado com resistor apropriado
pinMode(LED_PIN, OUTPUT);
// O pino do potenciômetro não precisa ser configurado como INPUT
// pois pins analógicos são inputs por padrão
// Inicia a comunicação serial para monitoramento
Serial.begin(9600);
Serial.println("==================================================");
Serial.println("PLATAFORMA TBLACKSBOT - SiriNEO Technologies");
Serial.println("Controle de Velocidade do LED com Potenciometro");
Serial.println("==================================================");
Serial.println("Gire o potenciometro (A2) para controlar a velocidade");
Serial.println("Valor minimo: LED pisca rapido");
Serial.println("Valor maximo: LED pisca lento");
Serial.println("==================================================");
}
// =============================================================================
// LOOP PRINCIPAL (executa repetidamente)
// =============================================================================
void loop() {
// Lê o valor do potenciômetro (0 a 1023)
valorPotenciometro = analogRead(POTENCIOMETRO_PIN);
// Converte o valor do potenciômetro para tempo de pisca (10ms a 2000ms)
// Quanto maior o valor do potenciômetro, mais lento o LED pisca
tempoPisca = map(valorPotenciometro, 0, 1023, 10, 2000);
// Acende o LED
digitalWrite(LED_PIN, HIGH);
// Exibe informações no monitor serial
Serial.print("Potenciometro: ");
Serial.print(valorPotenciometro);
Serial.print(" | Tempo pisca: ");
Serial.print(tempoPisca);
Serial.println(" ms");
// Aguarda o tempo determinado pelo potenciômetro
delay(tempoPisca);
// Apaga o LED
digitalWrite(LED_PIN, LOW);
// Aguarda o tempo determinado pelo potenciômetro
delay(tempoPisca);
}
// =============================================================================
// EXPLICAÇÃO DO FUNCIONAMENTO NA PLATAFORMA TBLACKSBOT
// =============================================================================
/*
* COMO FUNCIONA:
*
* 1. O potenciômetro de 5K está conectado ao pino analógico A2
* 2. O Arduino lê valores entre 0 e 1023 do potenciômetro
* 3. A função map converte esse valor para um intervalo de tempo (10ms a 2000ms)
* 4. O LED pisca com o tempo controlado pelo potenciômetro
*
* ESQUEMA DE LIGAÇÃO NA TBLACKSBOT:
*
* Potenciômetro de 5K:
* - Pino central (cursor) → A2 da TBLACKSBOT
* - Um pino externo → 5V
* - Outro pino externo → GND
*
* LED:
* - Já conectado internamente ao pino D13
*
* FUNÇÃO MAP:
*
* tempoPisca = map(valorPotenciometro, 0, 1023, 10, 2000);
*
* Isso significa:
* - Quando potenciômetro = 0 → tempoPisca = 10ms (muito rápido)
* - Quando potenciômetro = 512 → tempoPisca = 1000ms (1 segundo)
* - Quando potenciômetro = 1023 → tempoPisca = 2000ms (2 segundos)
*
* PARA OS ALUNOS:
*
* Experimentem modificar o código para:
* 1. Alterar a faixa de tempo (valores mínimo e máximo)
* 2. Inverter a lógica (potenciômetro no máximo = LED rápido)
* 3. Adicionar um botão para ligar/desligar o pisca-pisca
* 4. Controlar a intensidade do LED com PWM em vez do tempo
* 5. Usar o potenciômetro para controlar padrões diferentes de piscada
*/
// =============================================================================
// FIM DO PROGRAMA
// =============================================================================face_shakePISCA LED RGB - TBLACKSBOT
PISCA_LED_RGB_TBLACKSBOT.ino/*
* Nome Programa: TBLACKSBOT - LED RGB Pisca Cores
* Mentes Brilhantes TEC - Sirineo Technologies
* Explicação: Este código faz o LED RGB piscar 10 vezes em cada cor (Vermelho, Verde, Azul)
* Autor: Equipe TBLACKSBOT
* Acesse: https://sirineotechnologies.com/sirineo-wiki/GITbook-SiriNEOTchnologies-2024/Tblacksbot/tblacksbot.html
*
* Material necessário:
* - Plataforma TBLACKSBOT - SiriNEO Technologies
* - LED RGB 5050 integrado (pinos: Vermelho:D11, Verde:D6, Azul:D9)
* - Ferro de solda e solda para conectar os jumpers
*/
// =============================================================================
// DEFINIÇÃO DOS PINOS DO LED RGB NA TBLACKSBOT
// =============================================================================
#define LED_VERMELHO 11 // Pino do LED Vermelho (D11)
#define LED_VERDE 6 // Pino do LED Verde (D6)
#define LED_AZUL 9 // Pino do LED Azul (D9)
// CONFIGURAÇÃO INICIAL (executa uma vez ao ligar a TBLACKSBOT)
void setup() {
// Configura os pinos do LED RGB como SAÍDA
pinMode(LED_VERMELHO, OUTPUT);
pinMode(LED_VERDE, OUTPUT);
pinMode(LED_AZUL, OUTPUT);
// Inicialmente desliga todos os LEDs
digitalWrite(LED_VERMELHO, LOW);
digitalWrite(LED_VERDE, LOW);
digitalWrite(LED_AZUL, LOW);
// Inicia a comunicação serial para monitoramento
Serial.begin(9600);
Serial.println("==========================================");
Serial.println("TBLACKSBOT - Tutorial LED RGB");
Serial.println("Piscando cores: Vermelho, Verde, Azul");
Serial.println("Cada cor piscara 10 vezes");
Serial.println("==========================================");
}
// =============================================================================
// LOOP PRINCIPAL (executa repetidamente)
// =============================================================================
void loop() {
// Pisca 10 vezes na cor VERMELHA
Serial.println("Iniciando cor VERMELHA");
for(int i = 1; i <= 10; i++) {
digitalWrite(LED_VERMELHO, HIGH); // Acende vermelho
delay(50); // Aguarda 50ms
digitalWrite(LED_VERMELHO, LOW); // Apaga vermelho
delay(50); // Aguarda 50ms
Serial.print("Vermelho piscada: ");
Serial.println(i);
}
// Pequena pausa entre cores
delay(500);
// Pisca 10 vezes na cor VERDE
Serial.println("Iniciando cor VERDE");
for(int i = 1; i <= 10; i++) {
digitalWrite(LED_VERDE, HIGH); // Acende verde
delay(50); // Aguarda 50ms
digitalWrite(LED_VERDE, LOW); // Apaga verde
delay(50); // Aguarda 50ms
Serial.print("Verde piscada: ");
Serial.println(i);
}
// Pequena pausa entre cores
delay(500);
// Pisca 10 vezes na cor AZUL
Serial.println("Iniciando cor AZUL");
for(int i = 1; i <= 10; i++) {
digitalWrite(LED_AZUL, HIGH); // Acende azul
delay(50); // Aguarda 50ms
digitalWrite(LED_AZUL, LOW); // Apaga azul
delay(50); // Aguarda 50ms
Serial.print("Azul piscada: ");
Serial.println(i);
}
// Pausa final antes de reiniciar o ciclo
Serial.println("Ciclo completo! Reiniciando...");
Serial.println("==========================================");
delay(2000);
}
// =============================================================================
// INSTRUÇÕES DE MONTAGEM
// =============================================================================
/*
* IMPORTANTE: Antes de usar o LED RGB na TBLACKSBOT:
*
* 1. Verifique se os jumpers de solda na parte inferior da placa
* estão conectados corretamente para o LED RGB
*
* 2. Os jumpers devem estar soldados para conectar:
* - LED Vermelho → Pino D11
* - LED Verde → Pino D6
* - LED Azul → Pino D9
*
* 3. Se os jumpers não estiverem soldados, use um ferro de solda
* para fazer as conexões necessárias
*
* 4. O LED RGB da TBLACKSBOT é do tipo ânodo comum ou cátodo comum?
* - Este código foi feito para LED de cátodo comum
* - Se for ânodo comum, inverta HIGH/LOW no código
*/
// =============================================================================
// DICAS PARA OS ALUNOS
// =============================================================================
/*
* Experimente modificar o código para:
*
* 1. Alterar o tempo de piscada (50ms)
* 2. Aumentar ou diminuir o número de piscadas (10x)
* 3. Criar cores mistas (amarelo, roxo, ciano, branco)
* 4. Fazer transições suaves entre cores usando PWM
* 5. Controlar as cores com potenciômetro ou botões
*/
// =============================================================================
// FIM DO PROGRAMA
// =============================================================================face_shakeVariando Cores LED RGB - TBLACKSBOT
Varia_Cor_LEDRGB-TBLACKSBOT.ino/*
* Nome Programa: TBLACKSBOT - LED RGB Cores Divertidas
* Mentes Brilhantes TEC - Sirineo Technologies
* Explicação: Este código faz o LED RGB mostrar cores diferentes de forma simples
* Autor: Equipe TBLACKSBOT
* Acesse: https://sirineotechnologies.com/sirineo-wiki/GITbook-SiriNEOTchnologies-2024/Tblacksbot/tblacksbot.html
*/
// =============================================================================
// PINOS DO LED RGB NA TBLACKSBOT
// =============================================================================
#define LED_VERMELHO 11 // Pino do LED Vermelho (D11)
#define LED_VERDE 6 // Pino do LED Verde (D6)
#define LED_AZUL 9 // Pino do LED Azul (D9)
// =============================================================================
// CONFIGURAÇÃO INICIAL
// =============================================================================
void setup() {
// Configura os pinos do LED RGB como SAÍDA
pinMode(LED_VERMELHO, OUTPUT);
pinMode(LED_VERDE, OUTPUT);
pinMode(LED_AZUL, OUTPUT);
// Inicia a comunicação serial
Serial.begin(9600);
Serial.println("TBLACKSBOT - LED RGB Cores Divertidas!");
Serial.println("Vamos ver muitas cores bonitas!");
}
// =============================================================================
// LOOP PRINCIPAL - CORES SIMPLES
// =============================================================================
void loop() {
// 1. VERMELHO (só vermelho ligado)
Serial.println("COR: VERMELHO");
digitalWrite(LED_VERMELHO, LOW); // Liga vermelho
digitalWrite(LED_VERDE, HIGH); // Desliga verde
digitalWrite(LED_AZUL, HIGH); // Desliga azul
delay(1000); // Espera 1 segundo
// 2. VERDE (só verde ligado)
Serial.println("COR: VERDE");
digitalWrite(LED_VERMELHO, HIGH);
digitalWrite(LED_VERDE, LOW);
digitalWrite(LED_AZUL, HIGH);
delay(1000);
// 3. AZUL (só azul ligado)
Serial.println("COR: AZUL");
digitalWrite(LED_VERMELHO, HIGH);
digitalWrite(LED_VERDE, HIGH);
digitalWrite(LED_AZUL, LOW);
delay(1000);
// 4. AMARELO (vermelho + verde)
Serial.println("COR: AMARELO");
digitalWrite(LED_VERMELHO, LOW);
digitalWrite(LED_VERDE, LOW);
digitalWrite(LED_AZUL, HIGH);
delay(1000);
// 5. ROXO (vermelho + azul)
Serial.println("COR: ROXO");
digitalWrite(LED_VERMELHO, LOW);
digitalWrite(LED_VERDE, HIGH);
digitalWrite(LED_AZUL, LOW);
delay(1000);
// 6. CIANO (verde + azul)
Serial.println("COR: CIANO");
digitalWrite(LED_VERMELHO, HIGH);
digitalWrite(LED_VERDE, LOW);
digitalWrite(LED_AZUL, LOW);
delay(1000);
// 7. BRANCO (todas as cores)
Serial.println("COR: BRANCO");
digitalWrite(LED_VERMELHO, LOW);
digitalWrite(LED_VERDE, LOW);
digitalWrite(LED_AZUL, LOW);
delay(1000);
// 8. APAGADO
Serial.println("LED APAGADO");
digitalWrite(LED_VERMELHO, HIGH);
digitalWrite(LED_VERDE, HIGH);
digitalWrite(LED_AZUL, HIGH);
delay(1000);
Serial.println("----------------------");
}face_shakeVariando LEDRGB PWM - TBLACKSBOT
LEDRGB_PWM_variacor-TBLACKSBOT.ino/*
* Nome Programa: TBLACKSBOT - LED RGB com PWM
* Mentes Brilhantes TEC - Sirineo Technologies
* Explicação: Este código mostra como usar PWM para variar as cores do LED RGB
* Autor: Equipe TBLACKSBOT
* Acesse: https://sirineotechnologies.com/sirineo-wiki/GITbook-SiriNEOTchnologies-2024/Tblacksbot/tblacksbot.html
*/
// =============================================================================
// PINOS PWM DO LED RGB NA TBLACKSBOT
// =============================================================================
#define LED_VERMELHO 11 // Pino PWM do LED Vermelho (D11)
#define LED_VERDE 6 // Pino PWM do LED Verde (D6)
#define LED_AZUL 9 // Pino PWM do LED Azul (D9)
// =============================================================================
// CONFIGURAÇÃO INICIAL
// =============================================================================
void setup() {
// Configura os pinos do LED RGB como SAÍDA
pinMode(LED_VERMELHO, OUTPUT);
pinMode(LED_VERDE, OUTPUT);
pinMode(LED_AZUL, OUTPUT);
// Inicia a comunicação serial
Serial.begin(9600);
Serial.println("TBLACKSBOT - Variando Cores com PWM");
Serial.println("PWM = Controlar o brilho das cores!");
}
// =============================================================================
// LOOP PRINCIPAL - VARIANDO CORES COM PWM
// =============================================================================
void loop() {
Serial.println("Vermelho variando...");
variarVermelho();
Serial.println("Verde variando...");
variarVerde();
Serial.println("Azul variando...");
variarAzul();
Serial.println("Todas as cores variando...");
variarTodasCores();
Serial.println("----------------------");
}
// =============================================================================
// FUNÇÕES PARA VARIAR CORES
// =============================================================================
void variarVermelho() {
// Vermelho aumenta devagar
for (int brilho = 0; brilho <= 255; brilho++) {
analogWrite(LED_VERMELHO, 255 - brilho); // PWM no vermelho
analogWrite(LED_VERDE, 255); // Verde desligado
analogWrite(LED_AZUL, 255); // Azul desligado
delay(10);
}
// Vermelho diminui devagar
for (int brilho = 255; brilho >= 0; brilho--) {
analogWrite(LED_VERMELHO, 255 - brilho);
analogWrite(LED_VERDE, 255);
analogWrite(LED_AZUL, 255);
delay(10);
}
}
void variarVerde() {
// Verde aumenta devagar
for (int brilho = 0; brilho <= 255; brilho++) {
analogWrite(LED_VERMELHO, 255); // Vermelho desligado
analogWrite(LED_VERDE, 255 - brilho); // PWM no verde
analogWrite(LED_AZUL, 255); // Azul desligado
delay(10);
}
// Verde diminui devagar
for (int brilho = 255; brilho >= 0; brilho--) {
analogWrite(LED_VERMELHO, 255);
analogWrite(LED_VERDE, 255 - brilho);
analogWrite(LED_AZUL, 255);
delay(10);
}
}
void variarAzul() {
// Azul aumenta devagar
for (int brilho = 0; brilho <= 255; brilho++) {
analogWrite(LED_VERMELHO, 255); // Vermelho desligado
analogWrite(LED_VERDE, 255); // Verde desligado
analogWrite(LED_AZUL, 255 - brilho); // PWM no azul
delay(10);
}
// Azul diminui devagar
for (int brilho = 255; brilho >= 0; brilho--) {
analogWrite(LED_VERMELHO, 255);
analogWrite(LED_VERDE, 255);
analogWrite(LED_AZUL, 255 - brilho);
delay(10);
}
}
void variarTodasCores() {
// Todas as cores variam juntas
for (int brilho = 0; brilho <= 255; brilho++) {
analogWrite(LED_VERMELHO, 255 - brilho);
analogWrite(LED_VERDE, 255 - brilho);
analogWrite(LED_AZUL, 255 - brilho);
delay(10);
}
for (int brilho = 255; brilho >= 0; brilho--) {
analogWrite(LED_VERMELHO, 255 - brilho);
analogWrite(LED_VERDE, 255 - brilho);
analogWrite(LED_AZUL, 255 - brilho);
delay(10);
}
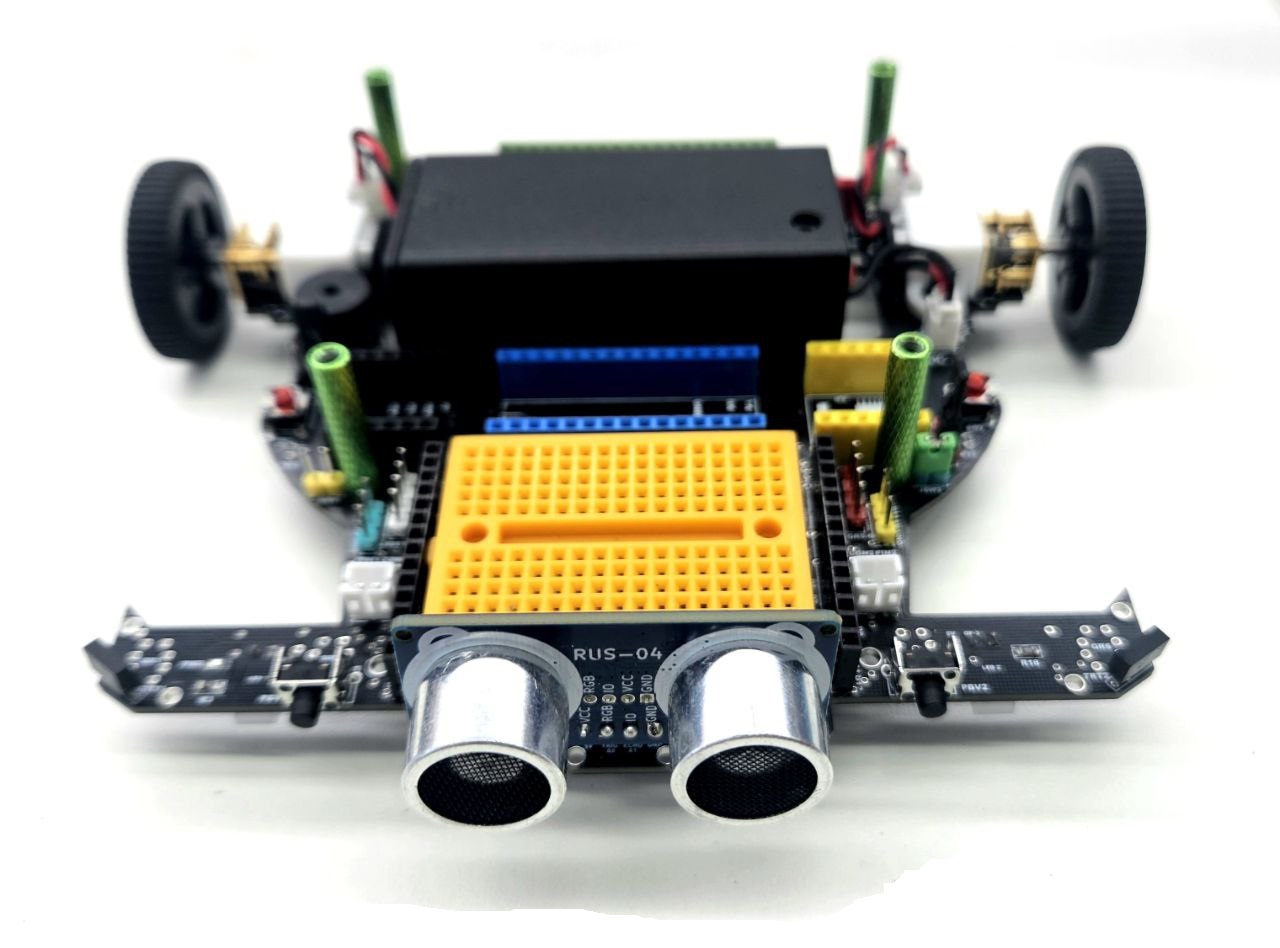
}face_shakeFazendo Leitura Sensor Ultrasonico HC-SR04 - TBLACKSBOT
Sensor_ultrasonico_HC-SR04.ino/*
* Nome Programa: TBLACKSBOT - Sensor Ultrassônico HC-SR04
* Mentes Brilhantes TEC - Sirineo Technologies
* Explicação: Mede distância com sensor ultrassônico e aciona LED RGB e buzzer
* Autor: Equipe TBLACKSBOT
* Observação: fazer o jumper para o Buzzer da TBLACKSBOT
* Acesse: https://sirineotechnologies.com/sirineo-wiki/GITbook-SiriNEOTchnologies-2024/Tblacksbot/tblacksbot.html
*/
// =============================================================================
// PINOS DA TBLACKSBOT
// =============================================================================
#define TRIG_PIN A0 // Pino Trigger do sensor (A0)
#define ECHO_PIN A1 // Pino Echo do sensor (A1)
#define BUZZER_PIN 13 // Pino do Buzzer (D13)
#define LED_VERMELHO 11 // Pino LED Vermelho (D11)
#define LED_VERDE 6 // Pino LED Verde (D6)
#define LED_AZUL 9 // Pino LED Azul (D9)
// =============================================================================
// VARIÁVEIS
// =============================================================================
long distancia; // Armazena a distância medida
long duracao; // Armazena o tempo do echo
// =============================================================================
// CONFIGURAÇÃO INICIAL
// =============================================================================
void setup() {
// Configura os pinos do sensor
pinMode(TRIG_PIN, OUTPUT);
pinMode(ECHO_PIN, INPUT);
// Configura os pinos do LED RGB
pinMode(LED_VERMELHO, OUTPUT);
pinMode(LED_VERDE, OUTPUT);
pinMode(LED_AZUL, OUTPUT);
// Configura o pino do buzzer
pinMode(BUZZER_PIN, OUTPUT);
// Inicialmente desliga tudo
digitalWrite(LED_VERMELHO, HIGH);
digitalWrite(LED_VERDE, HIGH);
digitalWrite(LED_AZUL, HIGH);
digitalWrite(BUZZER_PIN, LOW);
// Inicia a comunicação serial
Serial.begin(9600);
Serial.println("TBLACKSBOT - Sensor Ultrassônico HC-SR04");
Serial.println("Medindo distância...");
}
// =============================================================================
// LOOP PRINCIPAL
// =============================================================================
void loop() {
// Mede a distância
distancia = medirDistancia();
// Mostra a distância no serial
Serial.print("Distancia: ");
Serial.print(distancia);
Serial.println(" cm");
// Toma ações baseadas na distância
if (distancia < 10) {
// Muito perto (menos de 10cm)
Serial.println("MUITO PERTO! Cuidado!");
piscarVermelho();
tone(BUZZER_PIN, 1000); // Toca buzzer (1000Hz)
}
else if (distancia >= 10 && distancia < 30) {
// Distância média (10cm a 30cm)
Serial.println("Distancia media");
piscarAzul();
noTone(BUZZER_PIN); // Desliga buzzer
}
else {
// Longe (mais de 30cm)
Serial.println("Longe");
piscarVerde();
noTone(BUZZER_PIN); // Desliga buzzer
}
delay(100); // Pequena pausa entre medições
}
// =============================================================================
// FUNÇÃO PARA MEDIR DISTÂNCIA
// =============================================================================
long medirDistancia() {
// Limpa o pino trigger
digitalWrite(TRIG_PIN, LOW);
delayMicroseconds(2);
// Envia pulso de 10 microsegundos no trigger
digitalWrite(TRIG_PIN, HIGH);
delayMicroseconds(10);
digitalWrite(TRIG_PIN, LOW);
// Mede o tempo que o echo fica em HIGH
duracao = pulseIn(ECHO_PIN, HIGH);
// Calcula a distância (em cm)
// Velocidade do som = 340 m/s = 0,034 cm/microsegundo
// Distância = (tempo * velocidade) / 2 (ida e volta)
return (duracao * 0.034) / 2;
}
// =============================================================================
// FUNÇÕES PARA PISCAR o LED RGB
// =============================================================================
void piscarVermelho() {
digitalWrite(LED_VERMELHO, LOW); // Liga vermelho
digitalWrite(LED_VERDE, HIGH); // Desliga verde
digitalWrite(LED_AZUL, HIGH); // Desliga azul
delay(100);
digitalWrite(LED_VERMELHO, HIGH); // Desliga vermelho
delay(100);
}
void piscarAzul() {
digitalWrite(LED_VERMELHO, HIGH); // Desliga vermelho
digitalWrite(LED_VERDE, HIGH); // Desliga verde
digitalWrite(LED_AZUL, LOW); // Liga azul
delay(200);
digitalWrite(LED_AZUL, HIGH); // Desliga azul
delay(200);
}
void piscarVerde() {
digitalWrite(LED_VERMELHO, HIGH); // Desliga vermelho
digitalWrite(LED_VERDE, LOW); // Liga verde
digitalWrite(LED_AZUL, HIGH); // Desliga azul
delay(300);
digitalWrite(LED_VERDE, HIGH); // Desliga verde
delay(300);
}
// =============================================================================
// EXPLICAÇÃO DO FUNCIONAMENTO
// =============================================================================
/*
* COMO O SENSOR FUNCIONA:
*
* 1. Enviamos um pulso sonoro (inaudível) com o pino TRIGGER
* 2. O som bate em um objeto e volta (eco)
* 3. Medimos quanto tempo o eco levou para voltar (pino ECHO)
* 4. Calculamos a distância baseada no tempo
*
* ZONAS DE DISTÂNCIA:
*
* VERMELHO + BUZZER: Menos de 10cm → PERIGO!
* AZUL: Entre 10cm e 30cm → ATENÇÃO
* VERDE: Mais de 30cm → TUDO OK
*
* LIGAÇÕES NA TBLACKSBOT:
* - Sensor VCC → 5V da TBLACKSBOT
* - Sensor GND → GND da TBLACKSBOT
* - Sensor TRIG → Pino A0
* - Sensor ECHO → Pino A1
* - Buzzer (+) → Pino D13
* - Buzzer (-) → GND
*/
// =============================================================================
// FIM DO PROGRAMA
// =============================================================================face_shakeNome codigo- TBLACKSBOT
nomecodigo.inoinsira o codigoControle sem fio
A ser escrito...
Modo Seguidor de linha

A TBLACKSBOT Seguidora de Linha é um modo de operação em que o robô consegue detectar e seguir um caminho marcado no chão, geralmente uma faixa preta sobre fundo branco (ou o inverso). Esse tipo de robô é muito utilizado em competições de robótica educacional e ensina conceitos importantes de eletrônica, automação e inteligência artificial embarcada.
Abaixo a vista inferior da TBLACKSBOT, com o detalhes dos sensores seguidor de linha

Abaixo os sensores laterais na TBLACKSBOT que ajudam a evitar colisões laterais.
